Introduction
The process of designing the micro-jumping robot was iterative, two robot versions were completed within the set timeframe. Three jump tests were conducted in order to better bridge the difference between theoretical and experimental jump performance. Design inspiration was drawn primarily through biomimicry and existing robots. A contradiction matrix was drawn up as part of the initial evaluation to select the most promising concepts. To achieve the design requirements, due consideration was given to keep it simple and light, thereby doing away with complexities that would add weight and motor torque requirements. We chose to adopt a symmetrical triangular robot powered by compression springs under the action of a single high-torque motor (Figure 1).
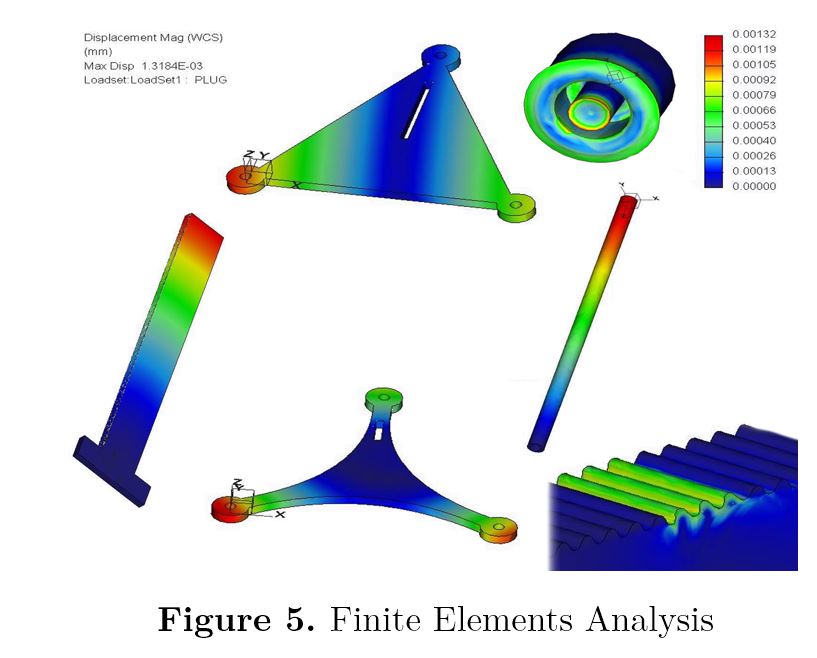
Subsequently, an initial mathematical model was done on MATLAB using elementary equations of motion. This gave the motor torque requirements for a specific jump & slide distance. Using these values, further sizing was done to find the dimensions of all components and a CAD model was constructed. Simultaneously, FE (Figure 5) and CFD analysis was conducted to optimize the structure and predict aerodynamic coefficients for improved performance predictions. Additionally, an attempt was made to design and construct the circuitry required for automated control of the robot. The robot’s simple construction and low costs provides a platform from which future versions may be mass produced, enabling robot swarms which can be employed in exploring other planets or otherwise.
Subsequently, an initial mathematical model was done on MATLAB using elementary equations of motion. This gave the motor torque requirements for a specific jump & slide distance. Using these values, further sizing was done to find the dimensions of all components and a CAD model was constructed. Simultaneously, FE (Figure 5) and CFD analysis was conducted to optimize the structure and predict aerodynamic coefficients for improved performance predictions. Additionally, an attempt was made to design and construct the circuitry required for automated control of the robot. The robot’s simple construction and low costs provides a platform from which future versions may be mass produced, enabling robot swarms which can be employed in exploring other planets or otherwise.

|
|
