Robot Working Principle
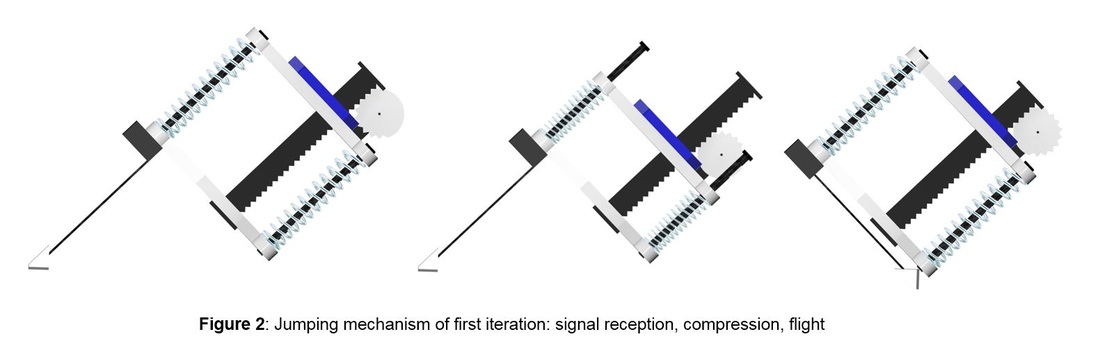
Two equilateral triangular platforms supported by three CFRP rods made the structure of the robot. The robot launches itself by action of three compression springs which accelerates the top platform. To increase momentum, the mass of the moving platform is maximized by placing the control circuit, battery and motor at the top. To reduce overall dimensions, springs of a lower stiffness were selected and installed with a pre-compression, to give the required force. Further compression was achieved by a 30% tooth 70% toothless gear which rides down a central shaft applying a compressive force along the centroid. This prevents twisting and ensures equal compression of all three springs. Remote control was achieved wing an IR transmitter closing the motor circuit through an LDR receiver. A 45° retractable CFRP foot positions the robot at the optimal launch angle. At lift-off, the weight of the robot is taken off the CFRP foot and elastic forces in the rod retract it, further reducing the overall robot size at landing. The working principle of the robot is illustrated in Figure 2.
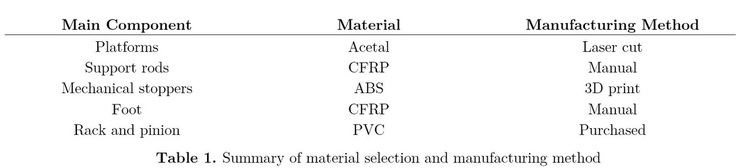
Material Selection and Manufacturing
Materials were chosen based on its specific stiffness and availability in the workshop. Manufacturing methods are as shown in Table 1 bearing in mind the accuracy required for all parts to fit right. Superglue was used as the adhesive of choice in conjunction with 3D printed stoppers for the platform.