2nd Robot iteration
|
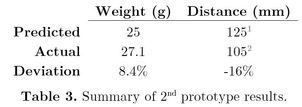
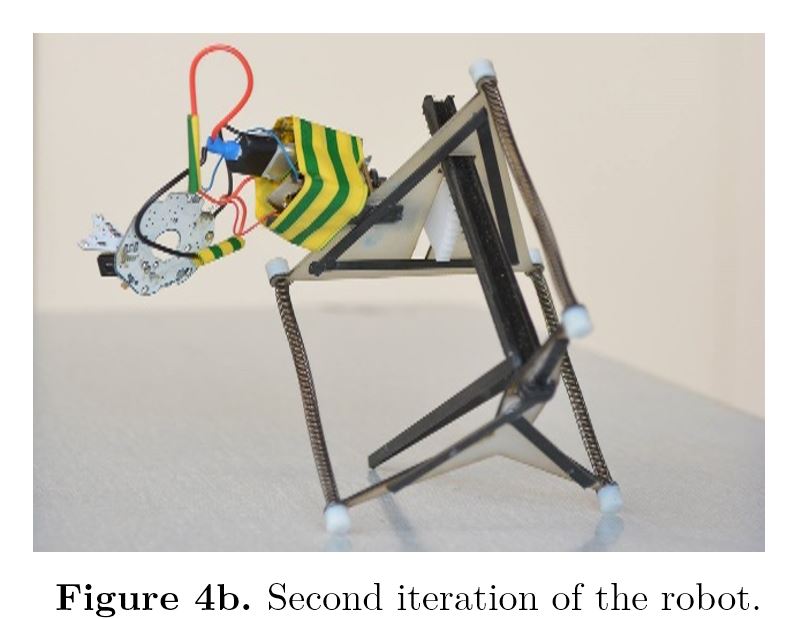
Figure 4b shows the 2nd constructed prototype completed at the start of the winter term. Sections of the lower platform were removed to save weight. The platforms were also redesigned with FR4, enabling a reduction in thickness. We took this opportunity to replace the self-designed circuit for a more reliable one adapted off a model helicopter which worked on the same principles of IR activation. This not only improved reliability but also saved further weight. The MATLAB model was also refined, it solved the 2nd ODEs given in the handout also accounting for non-linear acceleration and drag. The floor friction was included to predict the stop-roll distance. The predicted weight was then updated using CAD, catering for additional weight due to different circuitry. Table 3 summarizes the results of the 2nd jump test conducted compared with the refined expected MATLAB values.
|
|
Final jump test results
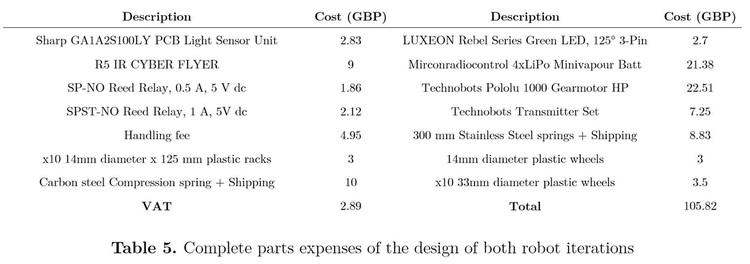
Table 4 summarizes the results from the final test jump conducted in early March 2015, earning the group a merit function of 0.32. The total cost for the project amounted to £105.82 (Table 5) due to the need for minimum order numbers, although component-wise, it would have been under £25.